本網(wǎng)訊 近日�,中南大學(xué)機電工程學(xué)院王敏老師聯(lián)合香港大學(xué)、香港城市大學(xué)�����、香港理工大學(xué)科研團隊完成的原創(chuàng)性研究成果���,以《基于內(nèi)磁場驅(qū)動的動量推進式毫米機器人》(Magnetically actuated momentum-driven millirobots)為題在《自然通訊》(Nature Communications)在線發(fā)表。機電工程學(xué)院王敏老師為論文第一作者����,香港大學(xué)劉軍副教授、香港城市大學(xué)張甲晨助理教授�、香港理工大學(xué)王鉆開教授共同擔(dān)任通訊作者。

MiaBot在受限及高阻力環(huán)境中的運動示意圖
微小型機器人在受限空間作業(yè)場景中具有不可替代的應(yīng)用價值����,廣泛適用于地下資源勘探、工業(yè)管道檢測��、災(zāi)后生命搜救、生物體內(nèi)精準診斷等關(guān)鍵領(lǐng)域����。近年來,全球科研界圍繞微小型機器人的驅(qū)動機制優(yōu)化����、結(jié)構(gòu)構(gòu)形創(chuàng)新、定位跟蹤技術(shù)升級及應(yīng)用場景拓展開展了系統(tǒng)性研究���,相關(guān)技術(shù)取得階段性進展�����。但受限于體積微型化帶來的設(shè)計約束�����,現(xiàn)有微小型機器人難以集成復(fù)雜傳動部件����,導(dǎo)致其在瞬時輸出力提升�、重載運輸實現(xiàn)及高阻力環(huán)境適配等方面仍面臨瓶頸,嚴重制約了技術(shù)落地應(yīng)用��。
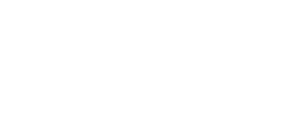
MiaBot負載性能與當前微小型機器人及動物負載性能對比圖
針對這一行業(yè)痛點,王敏及研究團隊創(chuàng)新提出集成永磁體-電磁線圈的內(nèi)驅(qū)動與動能轉(zhuǎn)換沖擊驅(qū)動的復(fù)合技術(shù)方案�����,成功研發(fā)出重量僅5.82g的小型電磁驅(qū)動機器人(MiaBot)���。該機器人在0.6A電流輸入條件下���,可實現(xiàn)16.67N的超高輸出力,突破了微小型機器人“體積小與出力強”的固有矛盾�����?��;谠摵诵募夹g(shù),機器人實現(xiàn)了在粘性液體��、砂礫介質(zhì)及受迫管道等典型高阻力環(huán)境中的穩(wěn)定運行�����,同時具備超自身300倍體重的重載運輸能力�。此外�����,團隊還攻克了機器人高效靈活的方向控制及無視覺依賴實時定位難題���,為微小型機器人驅(qū)動技術(shù)創(chuàng)新提供了全新范式,其成果有望在更多對輸出力有嚴苛要求的受限空間作業(yè)場景中實現(xiàn)規(guī)?����;瘧?yīng)用���。
(一審:張紫珂 二審:鄧皓迪 三審:韓艷)